
高速固定翼无人机(High-speed Fixed-wing UAV, Cruise Speed ≥ 0.8 Ma)作为一种具备高速巡航能力的空中平台,正逐渐成为军事与民用领域的重要力量。其应用场景广泛覆盖高速侦察、靶机模拟、电子对抗、打击任务等多个领域。这类无人机凭借其卓越的巡航速度和优良的升阻特性,能够在复杂的任务环境中高效执行任务。然而,由于其飞行环境往往更为复杂,尤其是在高空强风带、低空乱流区以及跨洋跨洲长航时飞行等任务中,需要面对持续大风、强阵风、湍流和侧风等多种风干扰,这对其抗风性能提出了极高的要求。
高速飞行本身就对无人机的气动设计、结构强度和飞控响应提出了更为严苛的要求,而抗风能力的设计不仅是保证任务飞行安全的基础,更是确保任务精度(包括航迹精度、传感器稳定性、武器投放精度等)的关键。与低速无人机相比,高速无人机的抗风设计呈现出“速度优势”和“环境压力”并存的显著特点。一方面,较高的飞行速度意味着相对气流扰动在整体气流中所占的比例较小,这在一定程度上有利于减少风对飞行的影响;另一方面,在大风条件下,高速飞行使得无人机的姿态变化更为剧烈,同时结构所承受的载荷也更大,给无人机的安全飞行带来了巨大挑战。
主页菌将从抗风等级定义与高速无人机典型指标、影响抗风性能的因素、提升抗风能力的设计措施、工程案例以及未来发展趋势等多个方面介绍无人机的抗风设计。
高速固定翼无人机的抗风等级
抗风等级定义
高速固定翼无人机的抗风等级通常以最大安全飞行风速或最大安全侧风分量来进行定义。当无人机的巡航速度≥0.8 Ma(约980 km/h)时,风对其飞行性能的影响主要体现在以下几个方面:
航迹偏差是风对高速无人机影响的重要表现之一。风会直接引起无人机航向和航迹的偏移,尤其是当侧风分量较大时,为了保持预定的飞行轨迹,无人机需要进行大幅度的航向修正。这不仅会增加飞行控制系统的负担,还可能影响任务的执行效率和精度。
结构载荷增加也是不可忽视的影响。阵风会使无人机产生瞬时的升力、侧力和弯矩增加,这将导致机翼、垂尾和机身等部件承受额外的应力。长期处于这种额外应力作用下,可能会对无人机的结构强度造成损害,甚至引发结构故障,危及飞行安全。

飞翼布局高速无人机
从抗风等级定义与高速无人机典型指标、影响抗风性能的因素、提升抗风能力的设计措施、工程案例以及未来发展趋势等多个方面介绍无人机的抗风设计。
高速固定翼无人机的抗风等级
抗风等级定义
高速固定翼无人机的抗风等级通常以最大安全飞行风速或最大安全侧风分量来进行定义。当无人机的巡航速度≥0.8 Ma(约980 km/h)时,风对其飞行性能的影响主要体现在以下几个方面:
航迹偏差是风对高速无人机影响的重要表现之一。风会直接引起无人机航向和航迹的偏移,尤其是当侧风分量较大时,为了保持预定的飞行轨迹,无人机需要进行大幅度的航向修正。这不仅会增加飞行控制系统的负担,还可能影响任务的执行效率和精度。
结构载荷增加也是不可忽视的影响。阵风会使无人机产生瞬时的升力、侧力和弯矩增加,这将导致机翼、垂尾和机身等部件承受额外的应力。长期处于这种额外应力作用下,可能会对无人机的结构强度造成损害,甚至引发结构故障,危及飞行安全。

锐鹰500高速无人机
控制面负荷变化同样会影响无人机的操纵性能。强风会加大舵面偏转所需的力矩,从而影响操纵的灵敏度。在高速飞行中,操纵灵敏度的降低可能会导致无人机对风干扰的响应滞后,进一步加剧飞行的不稳定性。
抗风等级参考值
高速固定翼无人机的抗风等级通常远高于多旋翼和低速固定翼机型,这与其自身的设计特点和任务需求密切相关。以下是几种常见类型高速固定翼无人机的抗风等级参考指标:
高速靶机(0.8~1.6Ma)的巡航速度在0.8~1.6Ma之间,其抗风等级(顺/逆风)为25~35m/s,抗风等级(侧风)为15~20 m/s,这类无人机常见于舰载或地面发射场景。

超声速侦察无人机的巡航速度为1.0~2.0Ma,由于需要在高空执行侦察任务,面临的风速较大,其抗风等级(顺/逆风)达到35~50m/s,抗风等级(侧风)为20~25m/s。
高速电子战无人机的巡航速度在0.9~1.5Ma范围内,主要用于中低空穿插飞行,其抗风等级(顺/逆风)为30~45 m/s,抗风等级(侧风)为18~22m/s。
需要注意的是,在高速飞行时,纵向(顺/逆风)风对无人机的影响相对较小,而横向(侧风)风的影响更为显著,特别是在无人机的起降阶段,侧风的影响尤为突出。
起降抗风指标
对于巡航速度在0.8Ma以上的高速无人机而言,起降阶段的抗风指标往往比巡航阶段更为关键。这是因为高速无人机通常具有较高的翼载和较大的起飞速度,在侧风起降时,对飞行控制系统和飞行员(或自动驾驶系统)的要求极高。其典型的起降抗风指标如下:
最大安全侧风为15~20m/s,这意味着当侧风风速超过该范围时,无人机的起降安全将无法得到保证。
最大阵风容忍度可达稳定风速的1.3~1.5倍。阵风具有突发性和短暂性的特点,对无人机的起降安全构成严重威胁,因此无人机需要具备一定的阵风容忍能力。
在甲板/跑道作业时,风向限制较为严格,侧风夹角不超过30°为佳。侧风夹角过大会增加无人机起降的难度和风险,影响起降的稳定性和安全性。
影响高速固定翼无人机抗风能力的因素
高速无人机的抗风性能是多学科综合设计的结果,涉及空气动力学、结构力学、飞行控制和任务飞行策略等多个方面。各个因素相互影响、相互制约,共同决定了无人机的抗风能力。
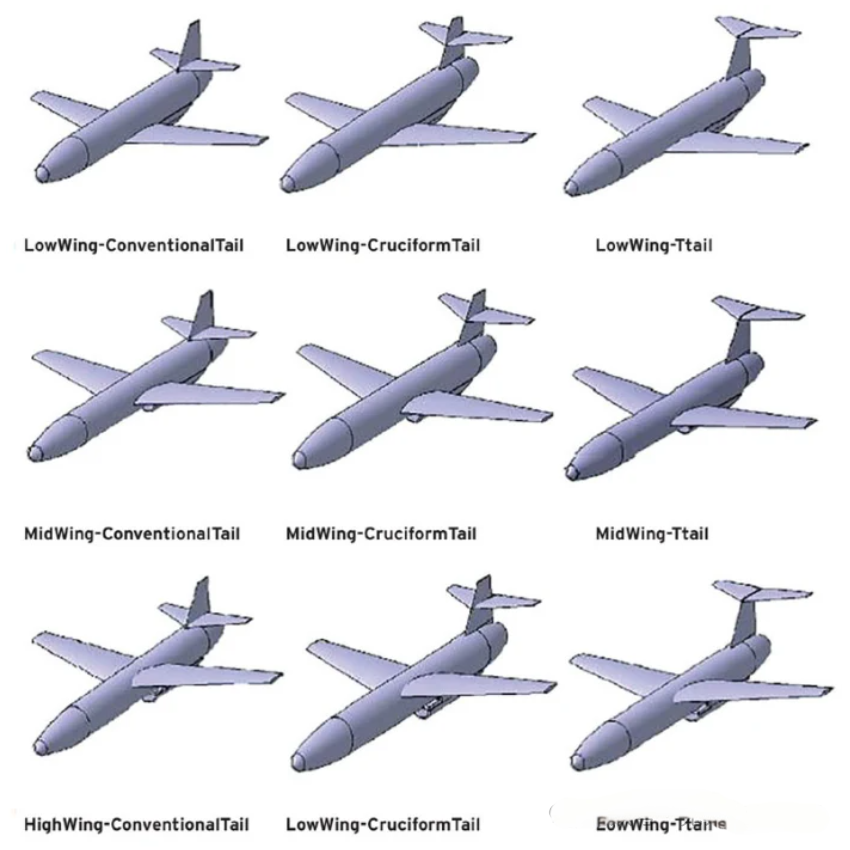
气动布局与外形
气动布局与外形是影响高速固定翼无人机抗风能力的关键因素之一,直接关系到无人机在气流中的受力情况和稳定性。
翼载与展弦比是重要的气动参数。高翼载设计在高速飞行时具有阻力小、稳定性好的优点,但在低速(起降)阶段,由于升力相对不足,抗风能力会有所下降。低展弦比机翼则在抗侧风方面表现较好,能够减少侧风引起的滚转力矩,但升力效率相对较低。
垂尾与方向舵面积对无人机的方向稳定性至关重要。垂尾面积越大,在侧风扰动下无人机的方向稳定性越好,能够更好地抵抗侧风的影响。然而,在高速飞行时,较大的垂尾面积可能会增加波阻,影响无人机的高速性能。

RQ-170高空高速无人机侦察机

高速靶机火箭助推发射
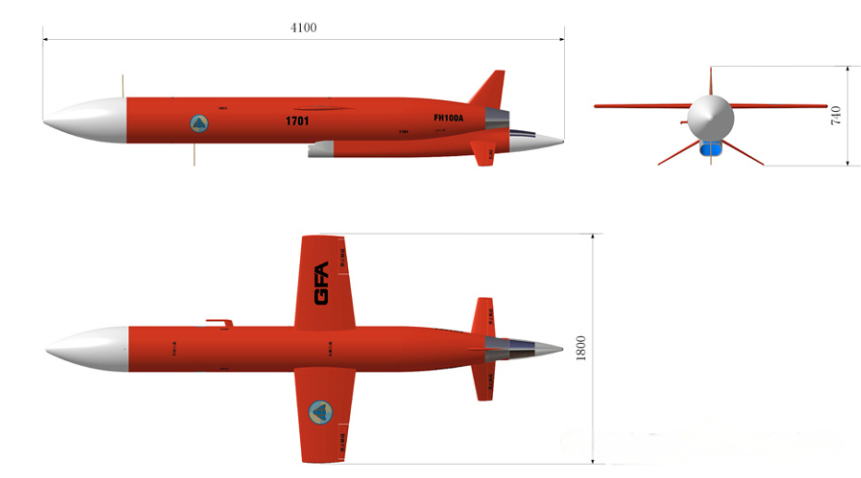
飞鹘100靶机
机身外形的设计也不容忽视。高速无人机通常采用高精度流线型设计,这种设计能够减少干扰阻力,提高无人机的气动效率。同时,流线型机身还能降低在侧风作用下的不对称气动效应,增强无人机的稳定性。
重量与惯性特性
无人机的重量与惯性特性对其抗风能力有着重要影响,主要体现在对风干扰的抵抗和响应速度上。
质量是一个关键因素。较重的无人机具有较大的惯性,在面对阵风等风干扰时,其运动状态的改变相对较为缓慢,抗阵风能力较强。但与此同时,较重的质量也会导致无人机的爬升与机动响应速度下降,影响其灵活性。
惯性矩分布同样不可忽视。沿纵轴、横轴、垂轴的惯性矩分布会影响飞行控制系统对侧风扰动的抑制效果。合理的惯性矩分布能够使飞行控制系统更有效地调整无人机的姿态,抵抗侧风干扰。
动力与推重比
动力系统为无人机提供飞行所需的动力,其性能直接影响无人机在风干扰下的飞行能力。推重比是衡量动力系统性能的重要指标,高推重比有助于无人机在强风中快速修正航向与速度,尤其是在起飞和爬升阶段,能够迅速克服风的阻力,保证飞行轨迹的稳定。
发动机瞬态响应也对无人机的抗风能力有影响。涡喷/涡扇发动机的加速响应时间会影响无人机在阵风下的速度补偿能力。快速的发动机瞬态响应能够使无人机及时调整推力,补偿因阵风引起的速度变化,维持稳定飞行。
控制系统性能
控制控制系统是无人机的“大脑”,其性能直接决定了无人机对风干扰的处理能力和控制精度。控制律设计是控制控制系统的核心,需要设计适应高速气动环境的增稳系统(SAS)与自动航迹保持系统(AP)。增稳系统能够提高无人机的稳定性,减少风干扰引起的姿态波动;自动航迹保持系统则能够使无人机在风干扰下保持预定的航迹,确保任务的顺利执行。
传感器延迟在高速飞行中会产生显著的影响。由于高速飞行时无人机的运动速度快,传感器延迟带来的误差会被放大,影响飞行控制系统的控制精度和响应速度。
阵风补偿算法是提高无人机抗风能力的重要手段。通过实时测风与预判,飞行控制系统能够提前修正舵面指令,抵消阵风对无人机的影响,保证无人机的稳定飞行。
结构强度与刚度
无人机的结构强度与刚度是其抵抗风载荷、保证飞行安全的基础。翼梁与机翼刚度至关重要,刚度不足会引发气动弹性变形(颤振),在强风中这种变形会加剧结构载荷的波动,严重时可能导致结构损坏。因此,需要保证翼梁与机翼具有足够的刚度。
机体连接结构的强度和可靠性也不容忽视。高速无人机通常采用钛合金、碳纤维复合材料等高强度、高刚度的材料来制造机体连接结构,以提高其刚度与疲劳寿命,确保在长期的风载荷作用下能够保持结构的完整性。
任务与飞行策略
任务与飞行策略的选择会间接影响无人机的抗风能力,合理的任务规划和飞行策略能够降低风对无人机的影响。高空风速通常大于低空,但湍流相对较少;低空则风速较低但乱流较多。无人机可以根据任务需求和气象条件,选择合适的飞行高度,以减少风的干扰。
飞行方向也会影响无人机的抗风性能。顺风飞行时,无人机的航程会增加;逆风飞行时,航程会减少;侧风则会考验飞行控制系统的能力。在规划飞行路线时,应充分考虑风向的影响,优化飞行轨迹。
任务载荷对无人机的抗风性能也有影响。外挂的任务载荷会改变无人机的气动对称性,从而影响其抗风性能。因此,在设计任务载荷时,需要考虑其对无人机气动特性的影响,尽量减少对无人机抗风能力的不利影响。
提高高速固定翼无人机抗风能力的措施
为了提高高速固定翼无人机的抗风能力,需要从多个方面采取综合措施,涵盖气动设计、动力与控制协同、结构与材料强化、飞控系统与算法升级以及任务与飞行策略等多个领域。
气动设计优化
气动设计优化是提高无人机抗风能力的基础,通过合理的气动布局和外形设计,能够有效改善无人机的气动性能,增强其抗风能力。
采用低展弦比机翼是提高侧风稳定性的有效措施。低展弦比机翼能够减少阵风引起的滚转力矩,使无人机在侧风环境下保持更好的稳定性。同时,低展弦比机翼在高速飞行时的阻力相对较小,有利于提高无人机的高速性能。
设计大面积垂尾与方向舵可以增强无人机的方向稳定性与侧风抵抗能力。较大的垂尾面积能够提供更大的恢复力矩,使无人机在侧风作用下能够迅速恢复稳定的航向;较大的方向舵则能够提供更大的操纵力矩,便于无人机在侧风中进行航向修正。
采用襟翼能够在起降阶段增加升力,提高低速抗风性能。在起降阶段,无人机的飞行速度较低,升力相对不足,通过调整襟翼位置,可以增加机翼的升力系数,提高无人机的升力,从而增强其在低速阶段的抗风能力。
动力与控制协同
动力系统与飞行控制系统的协同工作是提高无人机抗风能力的关键,只有两者密切配合,才能使无人机在复杂的风环境中保持稳定飞行。
采用高推重比动力系统能够确保无人机在强风中快速加速、爬升或逃逸。高推重比意味着动力系统能够提供更大的推力,使无人机能够迅速克服风的阻力,调整飞行状态,保证飞行安全。
发展变循环发动机技术是未来的趋势之一。变循环发动机能够根据不同的飞行状态(如高速巡航与低速起降)调整发动机的工作模式,兼顾高速巡航时的燃油效率和低速起降时的推力需求,从而提高无人机在不同风况下的适应能力。
实现飞控舵面解耦对于提高无人机在侧风下的控制精度至关重要。在侧风环境下,无人机的姿态容易出现耦合现象,通过飞控舵面解耦技术,能够同时协调副翼、方向舵与升降舵的动作,避免姿态耦合,使无人机能够更精确地调整姿态,抵抗侧风干扰。
结构与材料强化
无人机的结构强度和刚度是其抵抗风载荷的基础,采用高强度、高刚度的材料和优化的结构设计,能够提高无人机的抗风能力和结构可靠性。
使用高刚度复合材料可以减少风致变形,提高控制面的有效性。碳纤维复合材料等具有高强度、高刚度、轻量化的特点,能够有效提高无人机结构的刚度,减少在风载荷作用下的变形,保证控制面的操纵效率,从而增强无人机的抗风能力。
进行颤振抑制设计是防止阵风触发颤振的重要措施。通过安装阻尼器或采用主动控制技术,可以抑制机翼等部件的颤振,避免在强风中因颤振而加剧结构载荷波动,保证无人机的结构安全。
控制系统与算法升级
飞行控制系统与算法的升级是提高无人机抗风能力的核心,先进的飞行控制技术和算法能够使无人机更有效地应对各种风干扰。
采用阵风预测与前馈控制技术可以提高无人机对风干扰的响应速度。通过机载气象雷达或激光测风雷达提前获取风场信息,飞行控制系统能够根据预测的风场数据提前修正舵面指令,实现对风干扰的主动补偿,减少风对无人机飞行状态的影响。
实现自动航迹修正功能能够根据实时风速修正航向保持精度。飞行控制系统通过实时监测风速和无人机的实际航迹,与预定航迹进行对比,计算出航向修正量,自动调整无人机的航向,确保无人机沿着预定航迹飞行。
开发自适应增稳系统可以动态调整控制增益以适应不同风况。不同的风况对无人机的扰动程度不同,自适应增稳系统能够根据实时的风况信息和无人机的飞行状态,自动调整控制增益,使无人机在各种风况下都能保持良好的稳定性和操纵性。
任务与飞行策略
合理的任务规划和飞行策略能够充分利用无人机的性能,降低风对无人机的影响,提高任务的成功率。
制定侧风起降优化程序是保证无人机起降安全的重要措施。该程序能够自动计算侧风分量,并根据侧风分量的大小调整下滑道,使无人机在侧风条件下能够沿着合适的下滑道进行起降,减少侧风对起降的影响。
对于海上作业的无人机,采用舰载机弹射/拦阻协同技术可以减少侧风影响。弹射起飞能够使无人机在较短的距离内达到起飞速度,减少在起飞阶段受侧风影响的时间;拦阻降落则能够使无人机在侧风条件下快速减速并安全着陆,提高舰载无人机的起降安全性。
在制定飞行计划时,应尽量避开风切变区,以减少乱流与阵风的突发风险。风切变区的气流变化剧烈,对无人机的飞行安全构成严重威胁,通过提前获取气象信息,规划合理的飞行路线,避开风切变区,能够有效提高无人机的飞行安全性。